[› Projekt
[vimeo]http://vimeo.com/5164732[/vimeo]

Roboter »Limier« bei der Werkschau der Fakultät Architektur im Foyer des Hauptgebäudes der Bauhaus-Universität Weimar

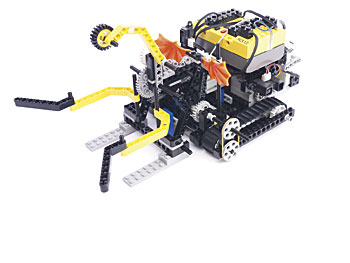
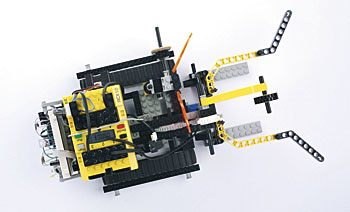
Roboter »Limier« in Aktion.
Mechatronisches Objekt // Der Roboter Limier entstand für den Roboterwettbewerb im SS 2007 der Bauhaus-Universität Weimar.
Ziel des Wettbewerbs war es einen Roboter zu bauen, der eine Getränkedose auf einem 2m großen Spielfeld findet und an seinen Ausgangspunkt zurückbringt.
Zur Verfügung standen Lego Mindstorms RCX-Baukästen.
Was auf den ersten Blick sehr einfach klingt setzt minimale Orientierung im Raum, Objekterkennung und Greiffähigkeiten voraus.
Die gefundene Lösung erweitert durch selbstentwickelte Elektronik die Sensorik des RCX um zusätzliche Eingänge und zwei Distanzsensoren (Sharp GP2D12 und GP2D02).
[> Dokumentation als PDF
[> Auszug aus der Dokumention
[> NQC-Programm
Ein Projekt von
Jens Weber
Andreas Wolter
30. Juli 2007